| void Impala::Application::Util::DoJudgeConcepts | ( | ) |
Definition at line 1367 of file mainUtil.cpp.
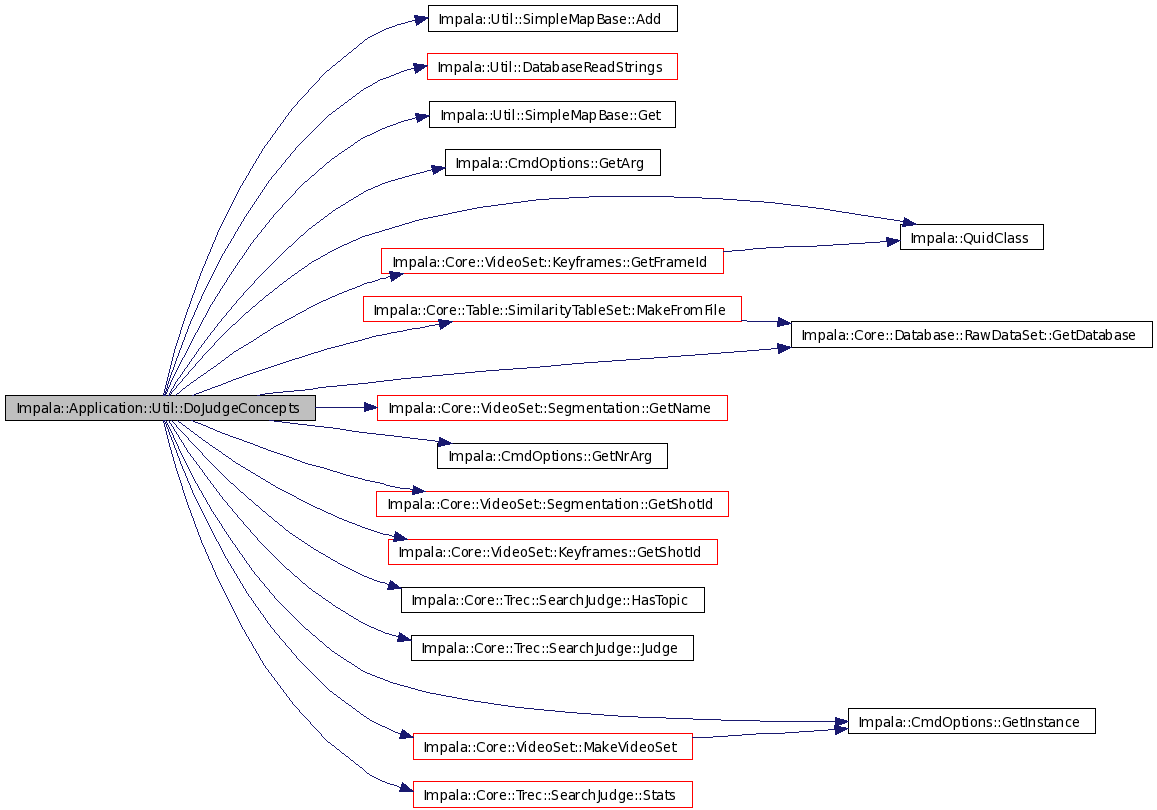
References Impala::Util::SimpleMapBase< IdxT, ElemT, DelT >::Add(), Impala::Util::DatabaseReadStrings(), Impala::Util::SimpleMapBase< IdxT, ElemT, DelT >::Get(), Impala::CmdOptions::GetArg(), Impala::Core::Database::RawDataSet::GetDatabase(), Impala::Core::VideoSet::Keyframes::GetFrameId(), Impala::CmdOptions::GetInstance(), Impala::Core::VideoSet::Segmentation::GetName(), Impala::CmdOptions::GetNrArg(), Impala::Core::VideoSet::Segmentation::GetShotId(), Impala::Core::VideoSet::Keyframes::GetShotId(), Impala::Core::Trec::SearchJudge::HasTopic(), ILOG_DEBUG, ILOG_ERROR, ILOG_INFO, ILOG_VAR, Impala::Core::Trec::SearchJudge::Judge(), Impala::Core::Table::SimilarityTableSet::MakeFromFile(), Impala::Core::VideoSet::MakeVideoSet(), Impala::QUID_CLASS_FRAME, Impala::QUID_CLASS_SHOT, Impala::QuidClass(), and Impala::Core::Trec::SearchJudge::Stats().
Referenced by mainUtil().
01368 { 01369 #ifndef REPOSITORY_TODO 01370 typedef Core::VideoSet::VideoSet VideoSet; 01371 typedef Core::VideoSet::Segmentation Segmentation; 01372 typedef Core::VideoSet::Keyframes Keyframes; 01373 typedef Core::Table::SimilarityTableSet SimilarityTableSet; 01374 typedef Core::Table::SimilarityTableSet::RankTableType RankTableType; 01375 01376 ILOG_VAR(Impala.Application.Util.DoJudgeConcepts); 01377 CmdOptions& options = CmdOptions::GetInstance(); 01378 if (options.GetNrArg() < 5) 01379 { 01380 ILOG_ERROR("Need at least 5 arguments"); 01381 return; 01382 } 01383 String vidSetName = options.GetArg(1); 01384 String namesPath = options.GetArg(2); 01385 String mappingName = options.GetArg(3); 01386 String judgeFile = options.GetArg(4); 01387 01388 VideoSet* vidSet = Core::VideoSet::MakeVideoSet(vidSetName); 01389 SegmentationLocator sLoc(vidSetName, "segmentation", options); 01390 Segmentation* segmentation = SegmentationRepository().Get(sLoc, vidSet); 01391 KeyframesLocator kLoc(vidSetName, "keyframes", options); 01392 Keyframes* keyframes = KeyframesRepository().Get(kLoc, vidSet); 01393 Impala::Util::Database* db = vidSet->GetDatabase(); 01394 SimilarityTableSet* simSet = 01395 Core::Table::SimilarityTableSet::MakeFromFile(namesPath, db); 01396 01397 std::vector<String> lines; 01398 Impala::Util::SimpleMap<String, String> conceptMapping; 01399 Impala::Util::DatabaseReadStrings(lines, mappingName, db); 01400 for (int i=0 ; i<lines.size() ; i++) 01401 { 01402 Impala::Util::StringParser p(lines[i]); 01403 String topic = p.GetString(' '); 01404 String concept = p.GetString(' ', false); 01405 std::cout << topic << " = " << concept << std::endl; 01406 conceptMapping.Add(concept, topic); 01407 } 01408 Core::Trec::SearchJudge judge(judgeFile); 01409 judge.Stats(); 01410 01411 Real64 miap = 0; 01412 int nrMiap = 0; 01413 std::cout << namesPath << ", size = " << simSet->TableSize() << std::endl; 01414 for (int c=0 ; c<simSet->NrTables() ; c++) 01415 { 01416 String concept = simSet->GetName(c); 01417 ILOG_DEBUG("Doing concept " << concept); 01418 std::vector<String> res; 01419 RankTableType* rTable = simSet->GetRankTable(c); 01420 for (int i=0 ; i<rTable->Size() ; i++) 01421 { 01422 Quid quid = rTable->Get1(i); 01423 int shot = -1; 01424 if (QuidClass(quid) == QUID_CLASS_FRAME) // assume it is a keyframe 01425 { 01426 int keyfr = keyframes->GetFrameId(quid); 01427 if (keyfr != -1) 01428 shot = keyframes->GetShotId(keyfr); 01429 } 01430 if (QuidClass(quid) == QUID_CLASS_SHOT) 01431 { 01432 shot = segmentation->GetShotId(quid); 01433 } 01434 if (shot == -1) 01435 { 01436 ILOG_ERROR("Unable to find shot for " << QuidObj(quid)); 01437 continue; 01438 } 01439 String name = segmentation->GetName(shot); 01440 if (std::find(res.begin(), res.end(), name) == res.end()) 01441 res.push_back(name); 01442 if (res.size() >= 2000) 01443 break; 01444 } 01445 String topic; 01446 if (!conceptMapping.Get(concept, topic)) 01447 { 01448 ILOG_ERROR("No topic for " << concept); 01449 continue; 01450 } 01451 if (!judge.HasTopic(topic)) 01452 { 01453 ILOG_INFO("No judge for " << topic << " = " << concept); 01454 continue; 01455 } 01456 Real64 infAP = judge.Judge(topic, res); 01457 std::cout << concept << " " << infAP << std::endl; 01458 miap += infAP; 01459 nrMiap++; 01460 } 01461 std::cout << "miap = " << miap / nrMiap << std::endl << std::endl; 01462 delete simSet; 01463 delete vidSet; 01464 #endif 01465 }
Here is the call graph for this function: