#include <InterestPointFeature.h>
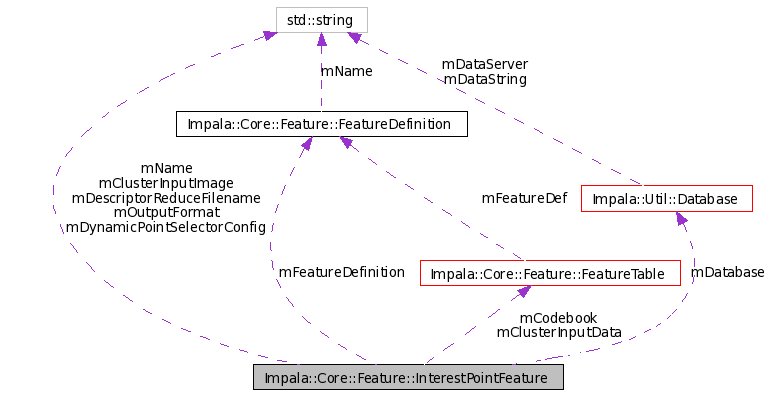
Collaboration diagram for Impala::Core::Feature::InterestPointFeature:
Public Types | |
| typedef Array::Array2dScalarReal64 | Array2dScalarReal64 |
| typedef Matrix::Mat | Mat |
| typedef Geometry::InterestPointSelector | InterestPointSelector |
| typedef Geometry::InterestPointList | InterestPointList |
| typedef Geometry::InterestPoint | InterestPoint |
Public Member Functions | |
| InterestPointFeature (CmdOptions &options) | |
| ~InterestPointFeature () | |
| String | GetFeatureName () |
| String | GetFeatureNameShort () |
| void | SetCodebook (String filename, Impala::Util::Database *db) |
| bool | FindInterestPoints (CmdOptions &options, Array::Array2dVec3UInt8 *input, Quid quid, String outputFilename, bool borderAlreadyRemoved=false, String loadRegionsFilename="") |
Static Public Member Functions | |
| static void | AddCmdOptions () |
Public Attributes | |
| int | mVerbose |
| int | mStripBorder |
| bool | mUseRecGauss |
| String | mName |
| FeatureDefinition | mFeatureDefinition |
| int | mKeepLimited |
| String | mOutputFormat |
| FeatureTable * | mCodebook |
| Mat * | mDescriptorReduce |
| String | mDescriptorReduceFilename |
| bool | mClusterInput |
| FeatureTable * | mClusterInputData |
| String | mClusterInputImage |
| std::vector< Vector::VectorTem< Real64 > * > | mLastCodebookVectors |
| std::vector< InterestPointSelector * > | mPointSelector |
| bool | mDynamicPointSelector |
| String | mDynamicPointSelectorConfig |
| Impala::Util::Database * | mDatabase |
| std::vector< Real64 > | mDenseSamplingScales |
| int | mSurfParams [3] |
Private Member Functions | |
| void | AddToPyramids (int codeword, double x, double y, int imageWidth, int imageHeight, std::vector< int > ®ionCounts) |
| void | ProjectUNC (Mat *matrixDescriptors, int imageWidth, int imageHeight, std::vector< int > &X, std::vector< int > &Y, std::vector< int > ®ionCounts) |
| void | ProjectHardMatrix (Mat *matrixDescriptors, int imageWidth, int imageHeight, std::vector< int > &X, std::vector< int > &Y, std::vector< int > ®ionCounts) |
| void | ProjectHardIndex (Mat *matrixDescriptors, PointDescriptorTable *pointData) |
| void | ProjectForest (Mat *descriptors, int imageWidth, int imageHeight, std::vector< int > &X, std::vector< int > &Y, std::vector< int > ®ionCounts) |
| PointDescriptorTable * | ProjectOntoCodebook (PointDescriptorTable *pointData, String codebookMode, int imageWidth, int imageHeight, Quid q) |
| PointDescriptorTable * | ReducePointCount (PointDescriptorTable *pointData, int keepCount) |
| template<class SrcArrayT> | |
| PointDescriptorTable * | DenseAllDetector (SrcArrayT *input) |
| template<class SrcArrayT> | |
| PointDescriptorTable * | DenseSamplingDetector (SrcArrayT *input, int spacing) |
| PointDescriptorTable * | ApplyDetector (Array::Array2dVec3UInt8 *inputNoBorder, String detectorMode) |
| void | ComputeDescriptors (PointDescriptorTable *pointData, Array::Array2dVec3UInt8 *inputNoBorder, String descriptorMode) |
Private Attributes | |
| ILOG_VAR_DEC | |
Definition at line 40 of file InterestPointFeature.h.
 1.5.1
1.5.1